|
ACG's Real Time Operating System (RTOS)
extensions generated smooth path alteration data in real time from a generalized "force" sensor. The path alteration behavior is akin to a force being superimposed on the robot and robot motion is altered to comply with the "force". The "force" sensor could be a joystick, a mouse or a 6 DOF hand controller.
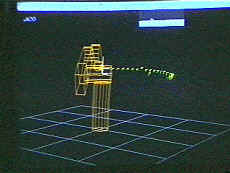
The real time path alteration software was integrated with an intuitive interface that enables users to preview motions, check for joint limits and work envelope conditions. The interface also shows an animation of a set of proposed motions, bounding box collision detection and path traces. If desired, the robot model can be made to follow the real robot, as it moves.
A spring mass damper model is applied to external inputs to provide smooth
and stable robot response. The spring mass and damper constants are
adaptively modified based on the pressure applied to the joystick and the
speed of motion of the hand. The system was thus proactive, based on
interpreted urgency, without being over-reactive at other times. At
all times, the robot system would also be monitoring its force and vision
sensors in order to avoid obstacle collisions.
The overall system response was thus both autonomous and supervised. We
refer to this superimposed behavior as supervised autonomy.
Under supervised autonomy, sensors over-ride operator commands in case the
commands could result in damage to the robot, work piece or
operator. Visual
feedback in the form of blocks were drawn on the robot animation screen -
which also modeled coarse robot trajectories to avoid obstacles was
developed to aid the
operator in understanding why the robot was not "obeying" him- as when the robot
one of the robot joints would hit the obstacle if the robot was moved.
Fine
motion trajectory was executed by a potential field path planner, driven
in part by force and range sensor data. |