
 Multi-radio
Backhaul
Dynamic Auto-channel
High
Speed mobility
Disruption-Tolerance
Multi-radio
Backhaul
Dynamic Auto-channel
High
Speed mobility
Disruption-Tolerance
 Robotics and Supervised Autonomy Focus
Robotics and Supervised Autonomy Focus
Meshdynamics' founder
Francis
previously started
Advanced Cybernetics Group.
ACG was contracted by the US Air Force and NIST to work on
Supervised
Autonomy for remote robots (telerobotics).
When it became apparent that last mile connectivity had its challenges, Meshdynamics
was formed to develop robust last mile real-time connectivity solutions for
semi-autonomous military machines.
In 2002, SPAWAR and USAF funded a multi-year NRE contract for us to develop a
distributed, fault-tolerant device and protocol agnostic
mesh control layer for use on
edge military gear. Our solutions
support
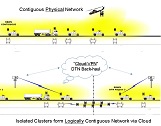
real time, “Stealth Chirps” securely over
logically contiguous cloud managed IP backbones.
Taking cues from Nature, we moved from
mesh
networks to ants (
mobility)
and now birds (
Chirp protocols).
Intellectual
Property And Its Embodiments
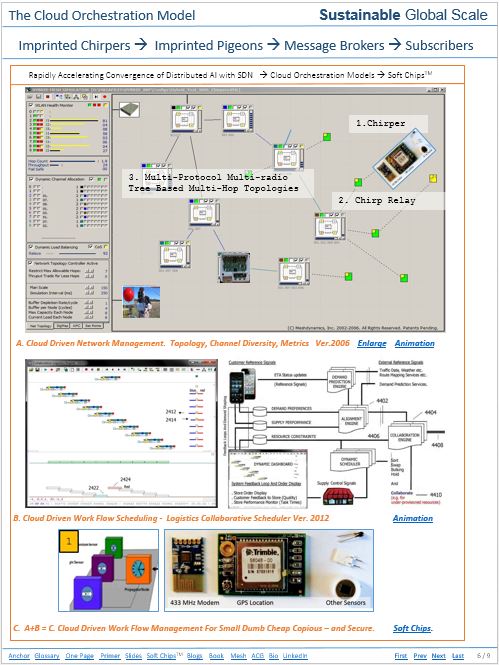
 Cloud Orchestration Model
Cloud Orchestration Model.
Protocol Agnostic
MeshControlTM and
SDMTM
Our multi-radio wireless mesh routers connect as logical branches of a tree. As in
Nature, a tree based routing is scalable,
efficient and deterministic. Trees are
inherently self healing.
The loss/corruption
of a branch, does not cripple the entire network.
Our mesh nodes manage branches of wireless network "trees", with
added features to support mobility, diverse transceivers etc.
A distributed control system, running on each router,
manages health of the network and clients. Nodes and
enterprise "apps" running on the mesh nodes, communicate
through periodic "heart beats". The heart beat framework also
supports publish and subscribe mechanisms for real time sensor
and control data streams. Exemplary source code for 80211.ac
radios provided with customization support for
licensee-specific radios, protocols and specialized use cases.
The
Chirp
Platform is built as an overlay piggybacking
intermittent Cloud-to-Edge connectivity.
More Detailed
Information
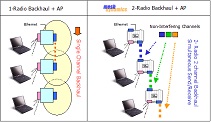
In 2002, mesh networks were 1 radio (simplex) and differed from our multi-radio approach
(Above Right).
This performance analysis
was published. Soon others were also selling two radio backhaul
mesh nodes.
This mother patent refers to our novel tree-based mesh approach
High Performance Wireless Networks Using Distributed Control
. See also
MDWMANOverview (2004)
The toll cost and hop cost taught in this patent was applied
to Pico nets. It was submitted to the IEEE 802.15.4
group on Ad hoc Mesh networking (as single radio meshed systems.
Managing Performance of 802.15.4 Ad hoc Mesh networks.
See also
Patent and
MDWPANOverview (2004)
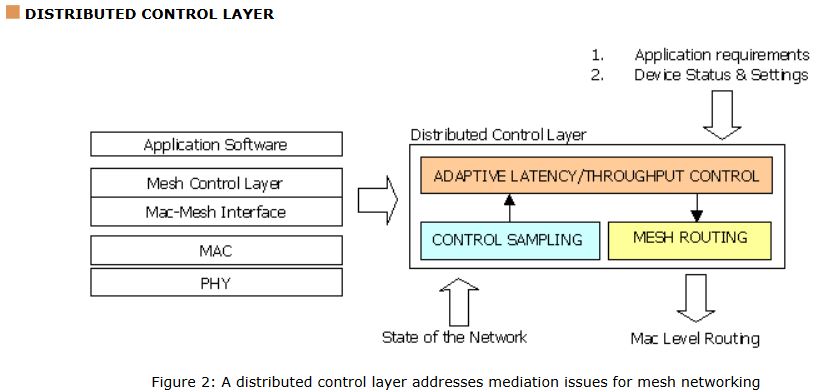
The Hybrid mesh (above, left) included both multi-radio backhauls and
single
radio meshed edge devices managed by a common mesh control layer (above
right). This distributed control and mediation layer was
radio and protocol
agnostic - by design. It manages both topology and timing - it is application
aware.
Chirp Packets:
Transporting Terse messages over IP presented challenges since IP
backbones prefer large packets and is best efforts based. We modeled
"Quasi-TDMA" Chirp flows with VOIP phones see:
Managing Jitter and Latency in Wireless LANs Related:
Real-Time-Mesh-Network
Mobility. Next, the Modular
Mesh nodes needed mobility for our military and mining customers. See:
Mobility Extensions for Wireless Multiple Radio Mesh and
Military-Mesh-Networks
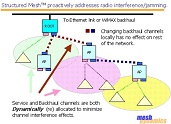
Disruption tolerance required fast switch over of routing topologies -
supervised autonomy, See:
Evolutionary Wireless Networks
Fast Topology reforming, look ahead learning simulator. Slides
Related:
Patents
and
Tutorials (Videos). For more on Chirp, please visit
Chirp Landing Page
{kind=link}